
数十年来,汽车行业一直有个美好的愿景——赋予车辆通信的能力。因为始终联网的汽车不仅可以让驾乘体验更舒适,更重要的是通过车对车(V2V)、车对行人(V2P)、车对基础设施(V2I)以及车对网络(V2N)的通信,能够让当下的交通环境更安全,并使未来的自动驾驶成为可能。
在中国国际经济交流中心国经咨询有限公司最新发布的《中国车联网产业发展研究》白皮书中,车联网产业不但将大幅度提高公路交通容量、减少碰撞事故和减少环境污染问题,且市场潜力巨大。据预测,2020年全球车联网V2X市场规模将突破6140亿元人民币,中国市场将达到2000亿元人民币,3亿存量车市场需要互联网连接。
两种方案,谁是正解?
目前,有两套V2X直接通信的关键规范—C-V2X(蜂窝车联网)和基于802.11p的专用短程通信(DSRC),它们分别隶属于3GPP和IEEE组织,都可以在5.9GHz智能交通系统(ITS)频谱上运行,并且都能在没有蜂窝网络、移动信号覆盖或网络运营商的地方正常运作。
Qualcomm技术标准高级总监李俨博士认为,从技术角度讲,C-V2X技术性能更加优异,这一点是毫无疑问的。但DSRC技术毕竟从1999年就出现了,经过近20年的发展,会让人感觉DSRC产业的整体发展比C-V2X要更快一些。

Qualcomm技术标准高级总监李俨博士
“其实还有一些技术层面以外的因素需要考虑。”李俨表示,目前DSRC技术的推动者大多来自欧洲,他们在DSRC上进行了大量投资,也在一直积极推动欧盟立法要求汽车行业使用DSRC技术。而蜂窝通信技术和产业的制造与研发重心更多是在美国、日本、韩国和中国。以中国市场为例,不管政府还是企业,都更看好C-V2X,2019-2020年就会看到C-V2X逐渐实现在量产汽车中的商用部署;美国政府的态度则是保持技术中立,让车企在DSRC和C-V2X之间自由选择技术。
“对于C-V2X在欧洲的发展,5G汽车协会(5GAA)正在设立相关项目来研究如何影响其产业格局。只要不强制通过立法去推动DSRC,C-V2X还是非常有信心去赢得北美和欧洲市场的。毕竟仅从生态系统规模来看,5GAA会员已接近百家,包括汽车制造商、一级供应商、移动运营商、半导体公司、测试设备供应商、电信供应商、交通信号供应商和道路运营商等。”李俨说。
他同时强调了引入一致性测试认证的重要性。目前,C-V2X上层应用分为三大阵营,分别是以美国汽车工程师学会(SAE)标准为基础的美标、欧洲电信标准协会(ETSI)旗下ITS工作组制定的欧标、以及由中国智能交通协会(China ITS)制定的国标。三大阵营暂时比较难以融合,可能会出现一些区域性的区隔。
2018年4月,福特、奥迪、Qualcomm、5GAA演示了全球首个跨不同汽车制造商车型的C-V2X直接通信技术;2018年7月,Qualcomm、5GAA、宝马、福特、标志雪铁龙、Savari进行了欧洲首个跨汽车制造商的C-V2X直接通信互操作性演示。最新的进展则来自中国。日前,高通与大唐电信联合宣布,利用高通9150 C-V2X芯片组和大唐LTE-V2X模组DMD31,成功实现了首个由多芯片组厂商支持的3GPP Release14 C-V2X直接通信(PC5)Mode 4(即LTE-V2X)互操作性测试。今年11月,Qualcomm将联合本土合作伙伴开展基于中国ITS协议栈的一致性测试。
“我领导的未来移动通信论坛车联网联合工作组在2017年完成了一个白皮书,主要就是研究一致性测试应该如何实施。”在分析了欧洲和北美测试验证体系的状态后,李俨认为在中国比较可行的办法是与美国OmniAir协会进行合作,因为中国标准和美标更加接近。为此,联合工作组和国内交通、电信、汽车等领域的标委会及相关机构进行了密切沟通,希望可以在2019年中期将基于OmniAir测试的完整认证体系在中国落地。
由于C-V2X包括直接通信和网络通信两种模式,涵盖V2N、V2P、V2I、V2V四个应用类型,所以除了车企外,运营商的态度也非常关键。当前,在V2N应用中,车企与运营商之间已经形成了良好的合作关系。运营商希望把路侧单元(RSUs)集成到基站中来提供公共服务,车企倾向于在车辆中集成C-V2X直接通信能力和V2N网络通信能力,因为这样可以利用传统运营商提供的网络能力、规模化的成本效益以及其能够帮助建立的认证能力,带动整个C-V2X行业的发展。
然而在V2I、V2P、V2V应用场景中,由于直接通信在独立5.9GHz频谱上运行,且无需SIM卡,因此基本上不需要运营商参与。李俨的观点是,针对V2I的应用场景,两种传输模式将会相互补充:一种是通过与运营商基站集成来完成RSU部署以充分利用这些信息基础设施,另一种是与RSU通过直接通信的方式去传输。但运营商需要思考的,是RSU部署的投入非常大,变现能力却不一定很强,现在还没有形成比较好的商业模式让运营商从中获益;而V2V涉及到汽车的安全问题,则可能更多需要从公共利益的角度去考虑。
关于C-V2X你可能不知道的10个事实
我们为什么需要蜂窝车联网?C-V2X技术是否真有传说中那么神奇?李俨博士为我们列举了以下10个事实:
· C-V2X专为低延迟直接通信设计,无需依赖于网络的援助。C-V2X直接通信提供增强的范围和可靠性,可以为V2V,V2I和V2P实现实时安全消息交换,而不需要签约任何种类的蜂窝网络

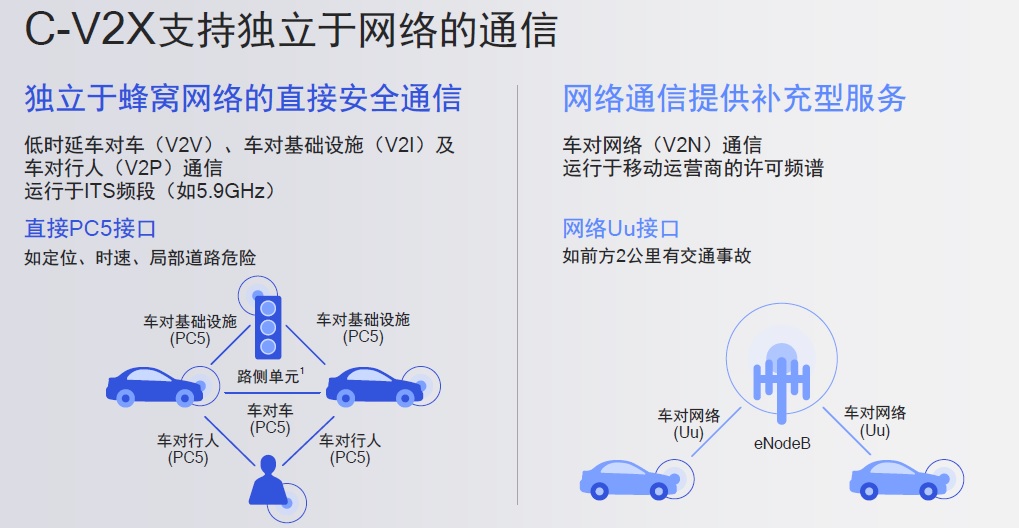
· C-V2X运行于面向安全应用的智能交通系统(ITS) 5.9GHz统一频谱上,使用低延迟传输直接通信发送,而不受在商业蜂窝频段上为远程信息处理和信息娱乐应用发送的V2N通信的影响,旨在拯救生命。C-V2X定义了两种互补的通信模式,分别是独立于蜂窝网络的直接安全通信,可实现车辆间(V2V),车辆与行人(V2P),车辆到道路基础设施(V2I)间的直接相互通信。在对于信息娱乐和延迟容忍的信息安全使用案例中(例如事发前一公里的道路),C-V2X还允许车辆通过蜂窝频谱上的移动网络(V2N)与云端进行通信。
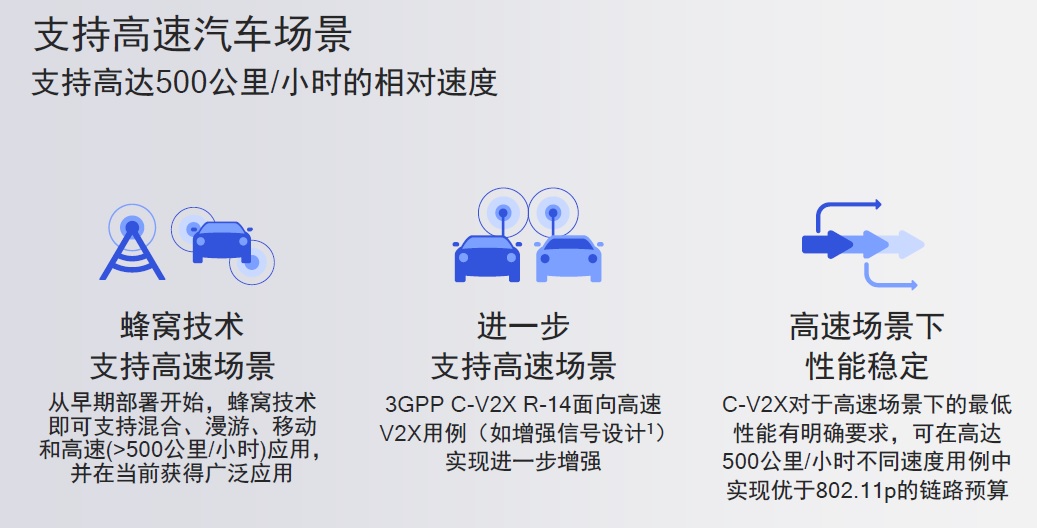
· C-V2X支持高速汽车场景,可支持在各种路况下相对速度高达500km/h的车辆使用案例。
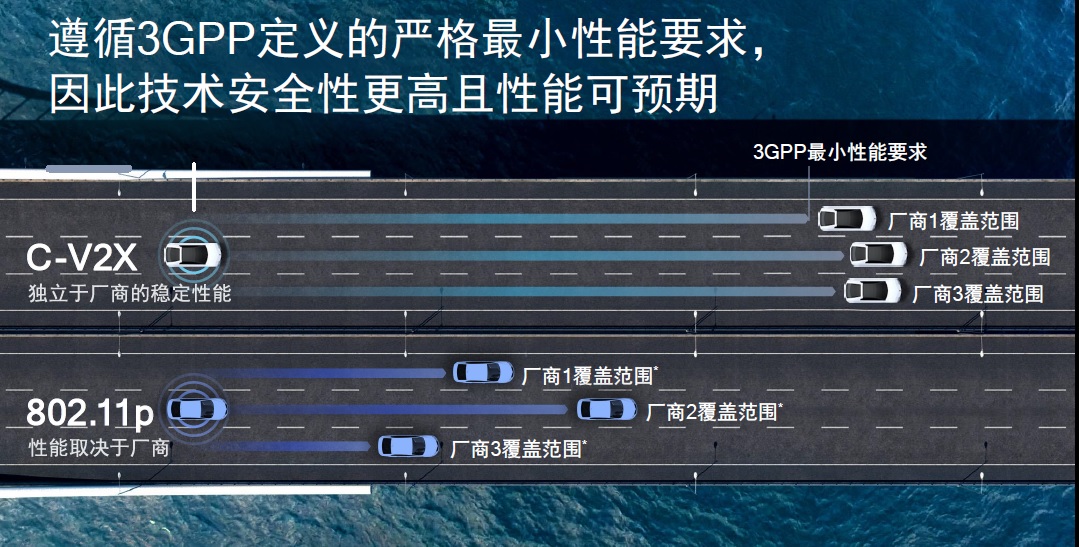
· C-V2X是一项具有可预测性能的安全技术:3GPP定义了严格的最低性能规范,确保了可预测的,统一的和有保证的现场体验,使应用程序像道路安全一样重要。例如,3GPP定义了信息组差错率(BLER)的最低要求,以保证在不同信道条件下的可靠通信,速度可达500km/h。与基于IEEE 802.11p的技术不同的是,每个C-V2X收发器/芯片组供应商都必须遵守这些规范,从而在现场实现可预测的统一性能。
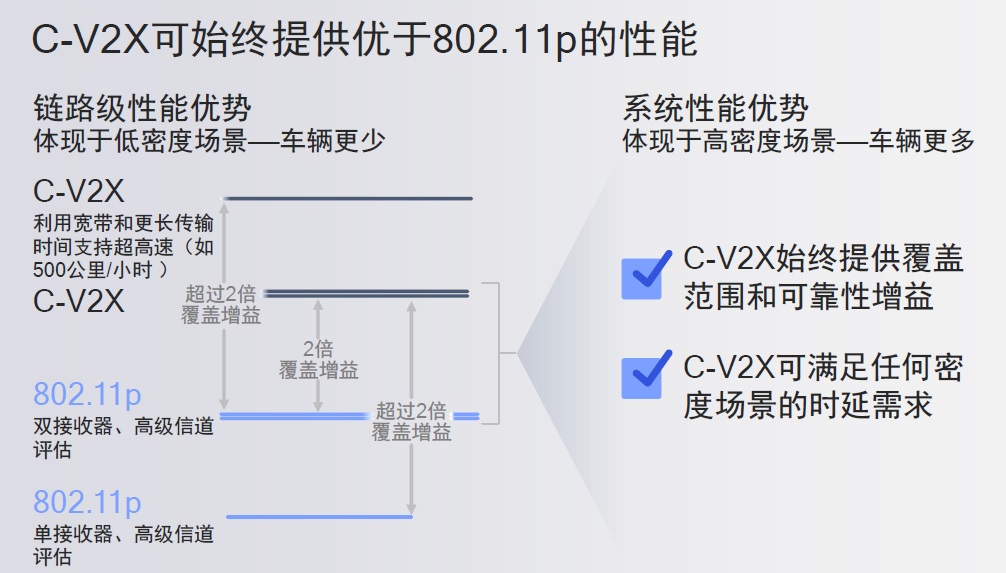
· C-V2X是一项具有卓越无线电性能的现代技术。相比基于DSRC和ITS-G5所使用的IEEE 802.11p无线电技术,C-V2X在LTE调制、编码及接收器等技术的推动下,能够实现更大范围的通讯(~2X),更好的非视距(NLOS)性能,更高的可靠性(更低的数据包错误率),更高的容量以及更好的拥塞控制,这对当下的关键安全驾驶实例以及未来的自动驾驶技术都有着重要的意义
· 即使在没有全球卫星导航系统(GNSS)的情况下,C-V2X能够从不同的数据源实现经济高效的同步功能。事实上,任何V2X技术都要依靠GNSS来获取位置信息,这对于ITS安全应用的运行是非常必要的。另一方面,与定位精度相比,V2X时间精度稳定性更好。

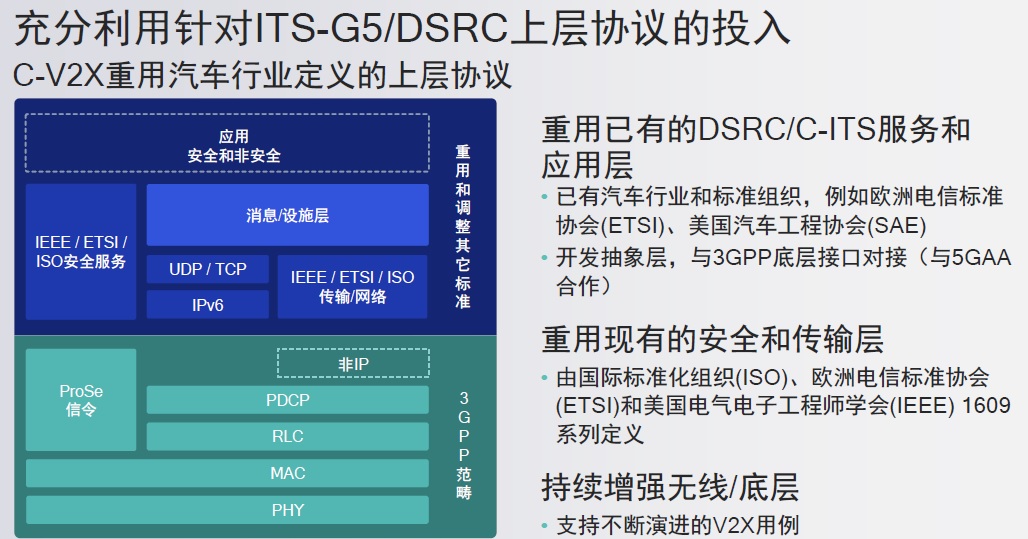
· 安全通讯对于任何V2X应用都很重要。C-V2X受益于已经建成的安全系统,传输层及由包括由国际标准化组织(ISO),欧洲电信标准协会(ETSI)和电气和电子工程师协会(IEEE 1609工作组)等汽车标准机构所定义的应用协议。
· 到2020年,C-V2X有望在量产车辆中实现商用部署。

· 比其他V2X技术更具成本效益。通过利用现有的网络通信基础设施(V2N),C-V2X可以结合路边单元(RSU)和蜂窝网络的功能来帮助提高安全性和自主性(例如提供本地或广域路况信息和实时地图更新)。结合RSU和蜂窝基础设施可以降低部署成本,从而带来重要的经济效益。蜂窝运营商在部署,管理和维护复杂的通信系统方面拥有丰富的经验,不仅可以节省成本,还可以返现新的业务模式和服务产业机会。

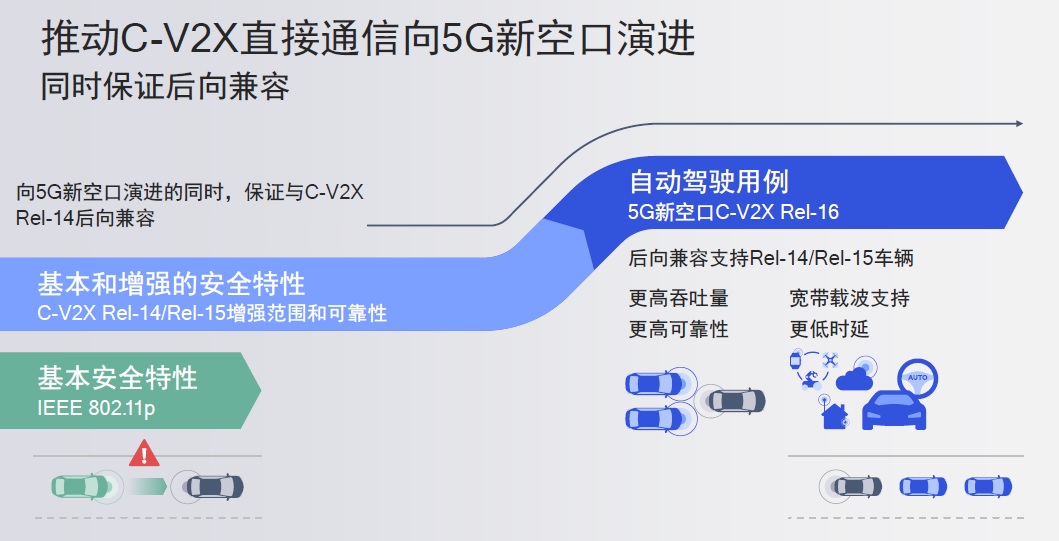
· C-V2X是唯一种具有清晰5G演化路径的V2X技术,能够前向/后向兼容。
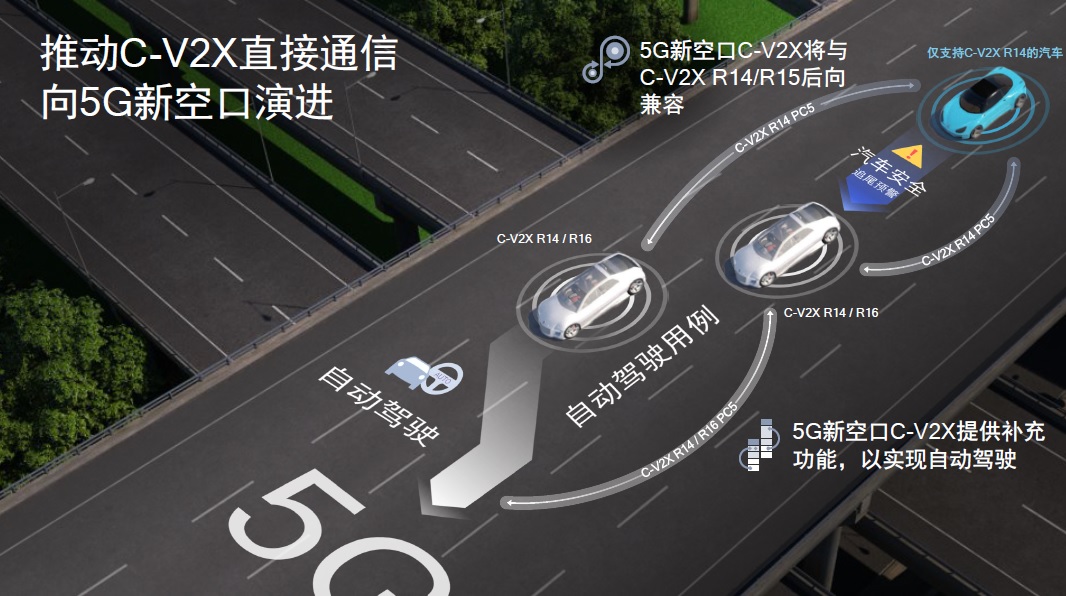
没有5G支持,自动驾驶是不可能实现的
Rel-14 C-V2X 除了具有卓越的性能和高性价比之外,也为未来基于5G NR的Rel-16 C-V2X 自动驾驶技术铺平了道路。通过结合5G NR功能,C-V2X的发展将具有高吞吐量、宽带载波支持、超低延迟和高可靠性等特点,从而实现自动驾驶和其他高级功能运用,如高吞吐量传感器共享、意向共享和3D高清地图更新等。
· 高精度动态地图
自动驾驶的核心是3D动态地图——高精度动态地图。事实上,即便目前的地图已经很精准,实时定位作为重要的感知手段依旧不容小觑。V2X的加持于汽车而言,如同装上了电子喇叭,车主可以实时共享自己的位置,同时也能知道其他人在地图上的位置。
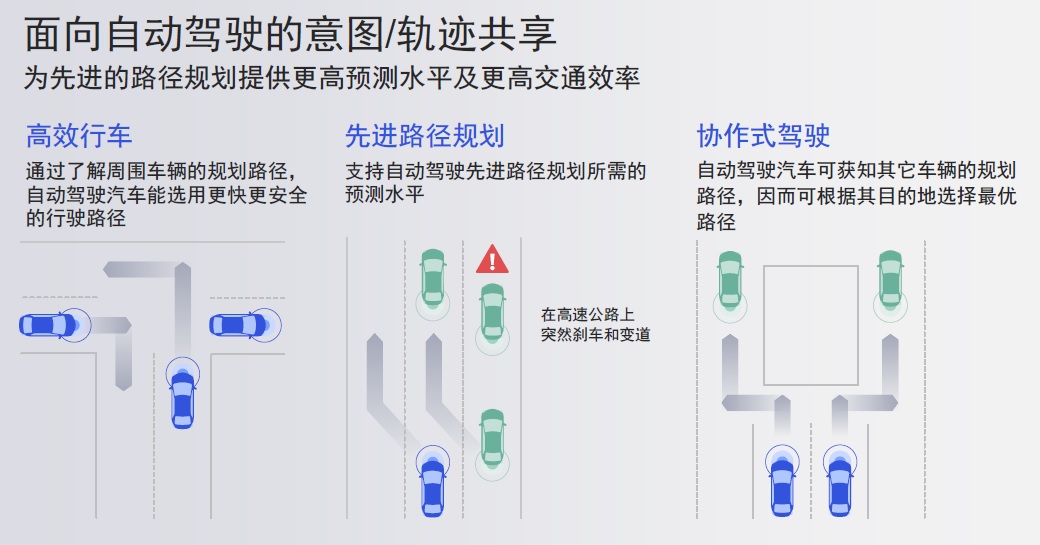
· 意图/轨迹共享
除了共享位置以外,我们还要共享意图,车与车之间要有协作。前车准备转弯时,要让相邻的车知道,这就是协助式的意图感知。但当所有车都在路面上行驶时,仅仅让相邻的车进行意图感知是不够的,此时就需要用共同的路径规划——也就是在系统级别上进行相互的意图传递。在一定程度上讲,未来智能交通的实现,离不开协作式的路径规划。
· 高吞吐量传感器共享
如今的汽车需要安装包括声光电、激光雷达、摄像头、毫米波等传感器采集数据,供智能计算机规划轨迹。但一旦数据不完整,这一目的就无法达到,所以要强调感知的能力。但行车过程中会存在视觉“盲点”,这对于自动驾驶汽车同样值得注意。移动汽车的感知能力需要扩展到视距以外,只有这样,当视线被快速移动的物体阻挡时,汽车可以通过雷达感知到。

责任编辑:董佳豪



